
Feet - Driving Foot Traction Assembly
Overview
The rear feet on the Remote Control unit were designed for traction only and did not provide any differential steering capabilities. Steering was accomplished via directional wheels housed the center foot.
The robot's traction drive features three forward speeds but lacks reverse capability. These three forward speeds are achieved by varying the voltage to the subsystem at 12 volts, 24 volts, or 36 volts
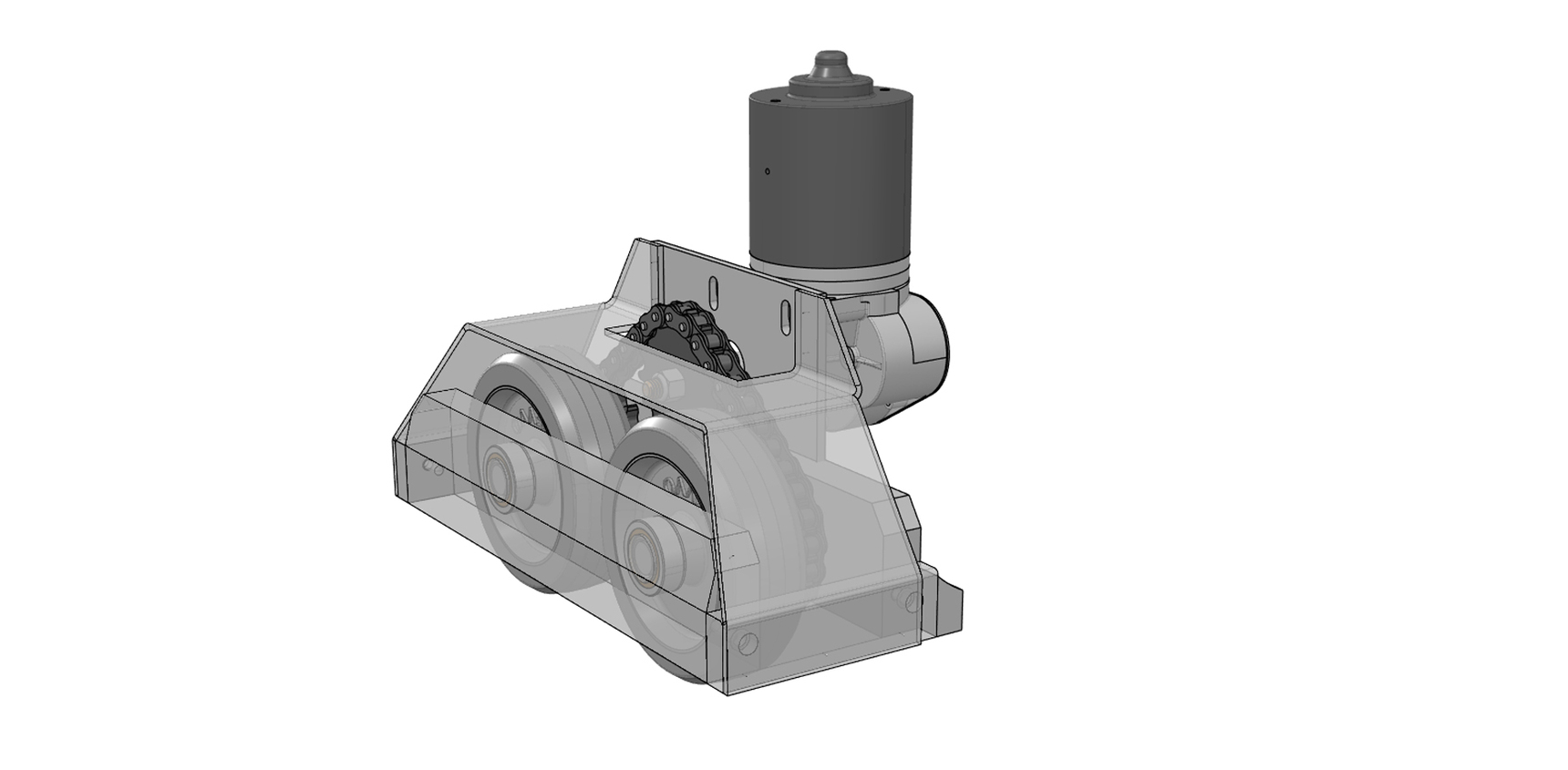
To achieve forward motion, the two feet attached to the standing legs are equipped with individual geared traction motors that drive the twin in-line wheels via chains and sprockets. Both rear feet incorporate driving motors that propel the wheels through gearboxes, chains, and sprockets.
While the gearboxes are fully enclosed, the chains and sprockets inside the feet are prone to clogging with debris pushed up by the wheels. Regular cleaning and oiling were recommended.
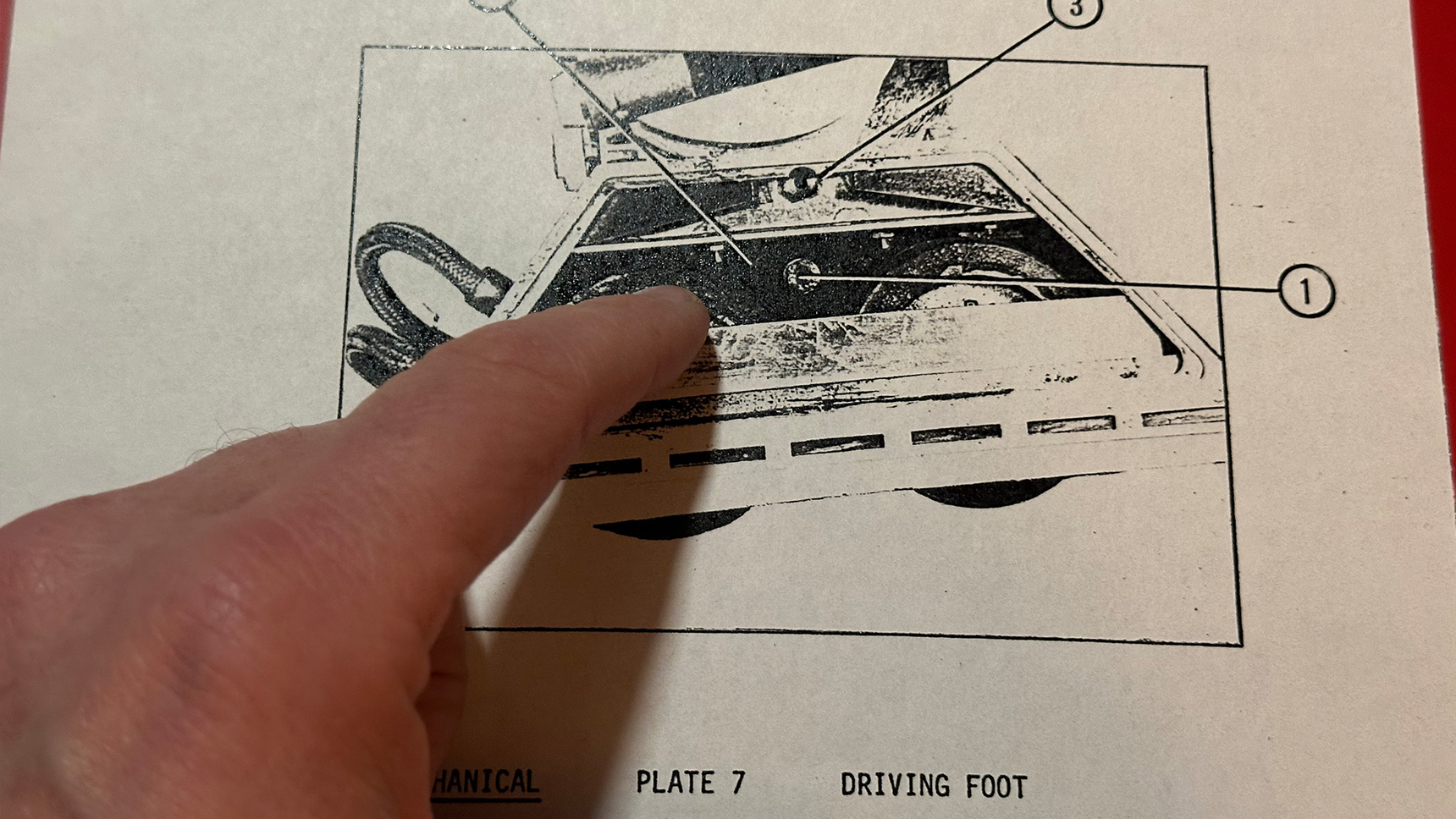
Image 01: Gearbox, chain, and sprockets as shown in Plate 7
Although not explicitly specified by the manufacturer or part number, photographic plates reveal that the geared traction motors are Lucas 17W windscreen motors. Each Lucas 17W connects to a 23-tooth sprocket, which drives a 1/4" motorcycle chain with 20 links. The chain, in turn, drives two wheel sprockets, each fitted to a wheel.
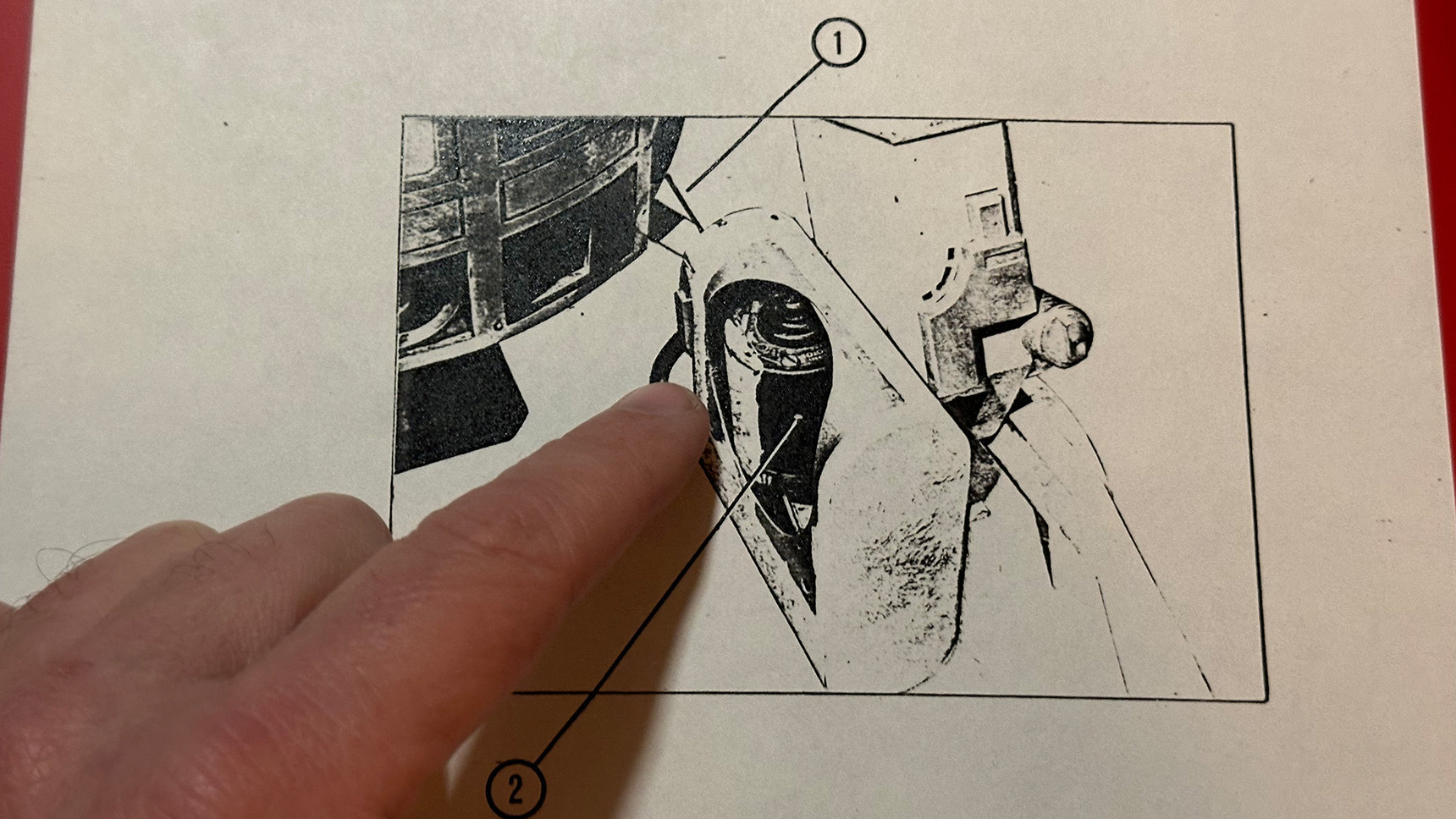
Image 02: Lucas 17W motor as shown in Plate 6
Drawings
Detail 4 does not seem to be dimensioned correctly on the drawing. For the assembly to fit together correct Detail 4 needs to be 1/16" longer.
Detail 9 is not explicitly called out with a balloon on the drawing. This detail as drawn is missing cutouts that allow each Detail 4 to fit.
Reply
Content aside
- 10 mths agoLast active
- 17Views
-
1
Following